
Dr. Suresh Reddy: Engineering Leader in Control Theory & Applications
Expert in Nonlinear & linear control theory, process control, active noise control, and control software development


Control Systems Theory & Applications
Nonlinear and linear control theory, Industrial and manufacturing process control, Active noise control, Control software development
Injection molding machines: GE-Fanuc control improvements
Polycarbonate sheet extrusion: GE process control (sheet ripple reduction concepts)
GE Aircraft Engine Turbine blades: Metal spray forming process control concepts
GE Reflector bulb manufacturing: silver stripping process control concepts
Relevant Experience at GE, MIT, Ohio State:
Vehicle control systems at GE and Caterpillar Inc (link)
Control of electric/hybrid powertrains and charging systems at GE, Caterpillar Inc and Fronius USA (link)
Control of electric power generation systems and microgrids at Caterpillar Inc & microgrids (link)
Manufacturing process control:
spray forming control concepts for aircraft engine turbine blades
GE Lexan™ polycarbonate sheet ripple reduction/ elimination - extrusion rolls control concepts (GE)
multivariable nonlinear control design of a new process for silver stripping (GE)
injection molding process control improvements, simulations, and control rapid prototyping (GE)
Noise control/reduction:
simulation of active control designs for exterior and interior noise of turboprop aircraft (GE)
Nonlinear control theory and applications:
Theory for nonlinear controls for systems with unknown dynamics (Time Delay Control), PID control for nonlinear systems (MIT & post-MIT)
Control of active magnetic bearings - implementation of Time Delay Control and comparison to linear analog compensator (MIT)
Control of active magnetic bearings - stability analysis and simulation of various nonlinear control systems(MIT)
Time Delay Control stability analysis for robotic manipulators (MIT)
Computer Aided control system design for nonlinear systems to avoid limit cycles, jump resonances and subharmonic oscillations (Ohio State)
Turboprop aircraft (OV-10A) : Active Noise Control Simulation
[Separate links for Control of Powertrains/Charging Systems; Control of vehicle systems; Control of power systems ]
Areas of Experience and Expertise
Linear and nonlinear control systems - analysis and design
Analysis and design of control systems with delay
Computer aided control system design for nonlinear systems
Control of magnetic bearings, robotic manipulators
Industrial/chemical/manufacturing process control
Active noise control
Vehicle control systems (link)
Control of electric/hybrid powertrains and charging systems (link)
Control of electric power generation systems & microgrids (link)
Modeling and simulation of systems and control
Model based software development
Software In the Loop/Hardware In the Loop (HIL)/Power HIL verification/validation
Key R&D Experience (at GE, MIT, Ohio State)
Turbomolecular Pump: Control of Active Magnetic Bearings
Robotic Manipulators (Control Analysis)
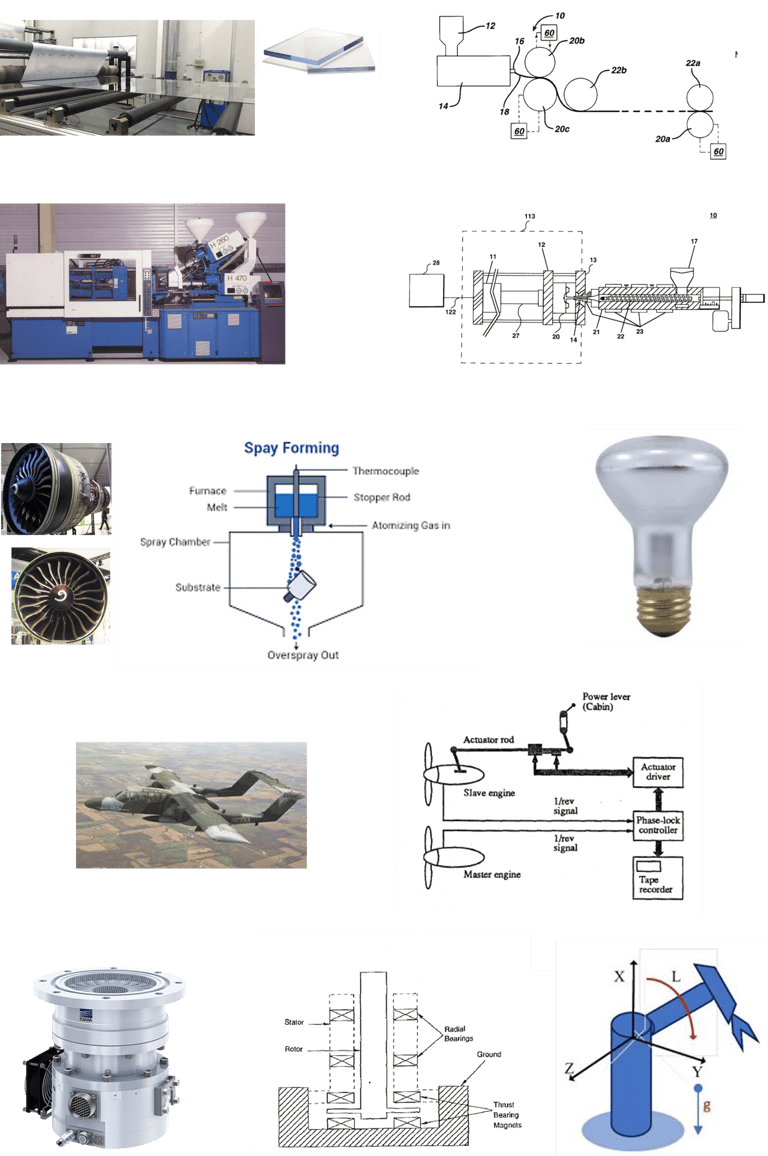
Images of industries and products used are illustrative of Dr Reddy's research and development in various companies - they are meant to be illustrative, but not necessarily identical
Sources of images of products:
Polycarbonate extrusion process - exceliteplas.com.au (illustrative); Polycarbonate sheets: acmeplastics.com (illustrative); Sheet rolling process control illustration - US Patent 6,250,904; Injection Molding machine - Wikipedia commons (illustrative); Injection molding control illustration - US Patent 6,430,466; GE aircraft engine and turbine blades - wikipedia; Spray forming process diagram - powdermetallurgy.com; Reflector light bulb - GE lighting website; OV-10A aircraft - NARA & DVIDS public domain archive; Turboprop active noise controller diagram - IEEE Conference publication; Turbomolecular pump - MIT work/photo under Ebara grant/permission; Rotor under magnetic bearings diagram - M.I.T. Ph.D. Thesis; robot manipulator - researchgate


Connect/Contact
© 2025. All rights reserved.

